
Notice
Recent Posts
Recent Comments
Link
| 일 | 월 | 화 | 수 | 목 | 금 | 토 |
|---|---|---|---|---|---|---|
| 1 | ||||||
| 2 | 3 | 4 | 5 | 6 | 7 | 8 |
| 9 | 10 | 11 | 12 | 13 | 14 | 15 |
| 16 | 17 | 18 | 19 | 20 | 21 | 22 |
| 23 | 24 | 25 | 26 | 27 | 28 | 29 |
| 30 | 31 |
Tags
- ur로봇
- 입문용청자켓
- 남자티셔츠브랜드
- ur로봇 역기구학 코드
- 연구분야 고르기
- 노익스부스터
- 순썹손질
- 남자스트릿
- 대학교 개강룩
- 개강룩
- ur5 역기구학 코드
- 정기구학
- #forward kinematics
- 남자레이어드티셔츠
- 연구분야 선택
- BTSgoods
- 닭가슴살 싸게 사기
- ur5 역기구학
- 입문용 트렌치 코트
- ur5 code
- 연구분야
- 운동루틴추천
- 와펜패치
- 셀프사진관
- 역기구학
- 카페인 알약
- 입문템
- 세일
- ur5 inverse kinematics code
- 남자 눈썹 손질
Archives
- Today
- Total
MTE-devel
2 link robot MPC 경로계획 코드 실습해보기 본문
https://github.com/28shambhavi/arm_mpc
위의 페이지를 참고 했다. ROS noetic 환경
GitHub - 28shambhavi/arm_mpc: ROS package for simulation of model predictive control of a dynamic 2 DOF robotic arm
ROS package for simulation of model predictive control of a dynamic 2 DOF robotic arm - 28shambhavi/arm_mpc
github.com
catkin_init_workspace 명령어로 지정한 소스코드 디렉토리에 아래 명령어를 입력해 패키지를 다운로드 받는다.
git clone https://github.com/28shambhavi/arm_mpc.git소스코드 디렉토리의 상위 폴더에서 빌드한다.
다음 아래 명령어로 패키지를 실행한다.
roscd arm_mpc/launch
roslaunch control_display.launch처음엔 아래와 같은 오류가 확인되었고 읽어보면 controller_mpc.py와 tf_endEffector.py가 원한 문제로 인해 실행되지 않는다는 것이다.

아래 코드 처럼 입력하여 해결하였다.

다시 아래 코드 블럭을 터미널에 입력하여 경로계획이 잘 되는 것을 확인할 수 있었다.
roscd arm_mpc/launch
roslaunch control_display.launch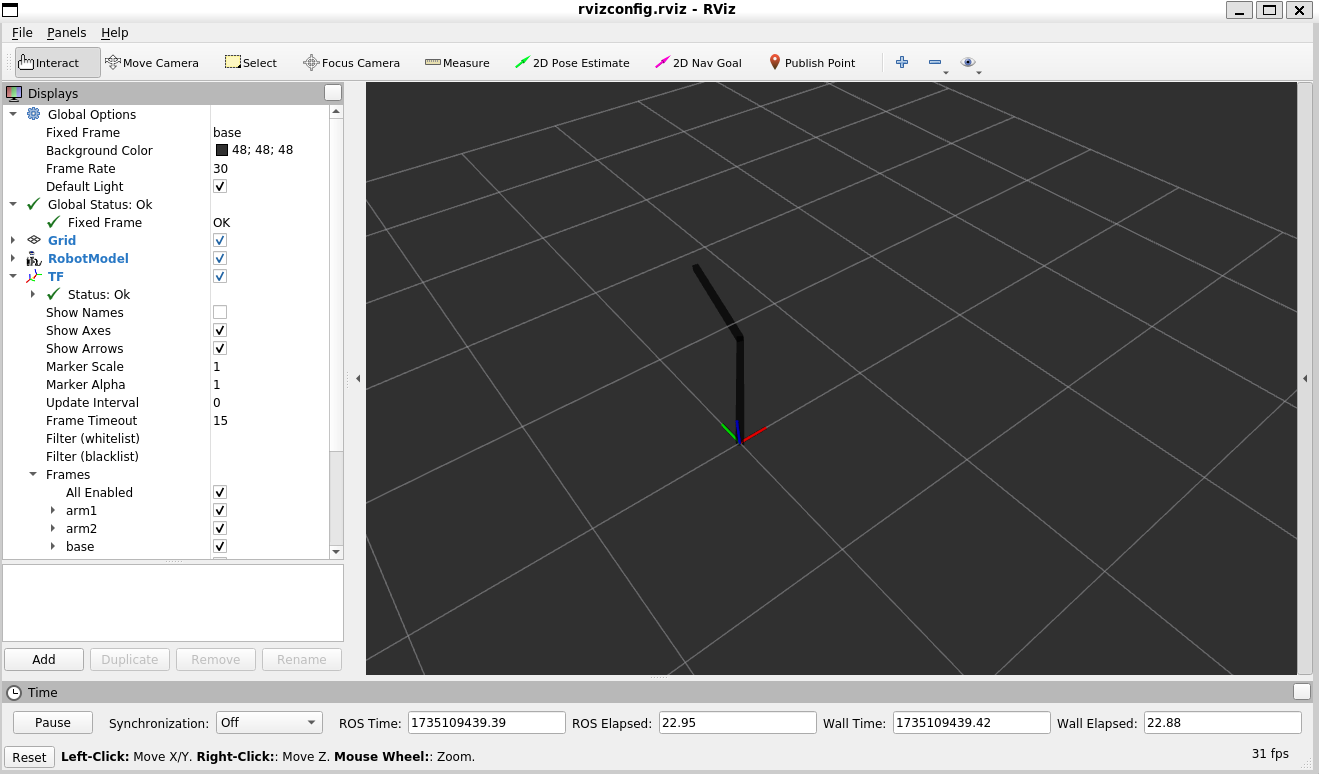
코드를 수식적으로 분석해봐야 MPC가 어떻게 작동하는 지 알 수 있을것 같다.
경로계획을 공부하는 사람들에게 예제 패키지로 좋은 것 같고 힘제어를 위한 예제를 찾는 나에게는 적절하지 않은 것 같다. 앞으로는 2link 로봇 패키지를 조금 더 찾아보거나 해당 패키지를 수정해볼 예정이다.
'연구공부' 카테고리의 다른 글
| WSL-ROS 환경 설정 (0) | 2024.12.25 |
|---|---|
| WSL 환경에 ROS 설치 (0) | 2024.12.21 |
| WSL에 원하는 우분투 버전 설치하기 (0) | 2024.12.21 |
| WSL2 설치 (0) | 2024.12.21 |
| 리눅스 듀얼부트 삭제 기록 (0) | 2024.12.19 |
'연구공부' Related Articles
more




Comments